
New research promises improved design and interfacing of exosuits
Low back pain (LBP) is a leading cause of disability for occupational tasks involving repetitive lifting contributing to compressive forces on the lumbosacral joint. (EMG)-driven musculoskeletal (EMS) models offer a novel personalized approach to assess the compressive forces during lifting. However, these models typically rely on multiple wearable sensors, which reduces the modelss’ practicality for real-world applications. In a recent early access publication by Jan Willem A. Rook, Massimo Sartori and Irfan Refai from SWAG partner University of Twente an innovative approach was developed that reduces the number of EMG sensors required enhancing the wearability of the EMS.
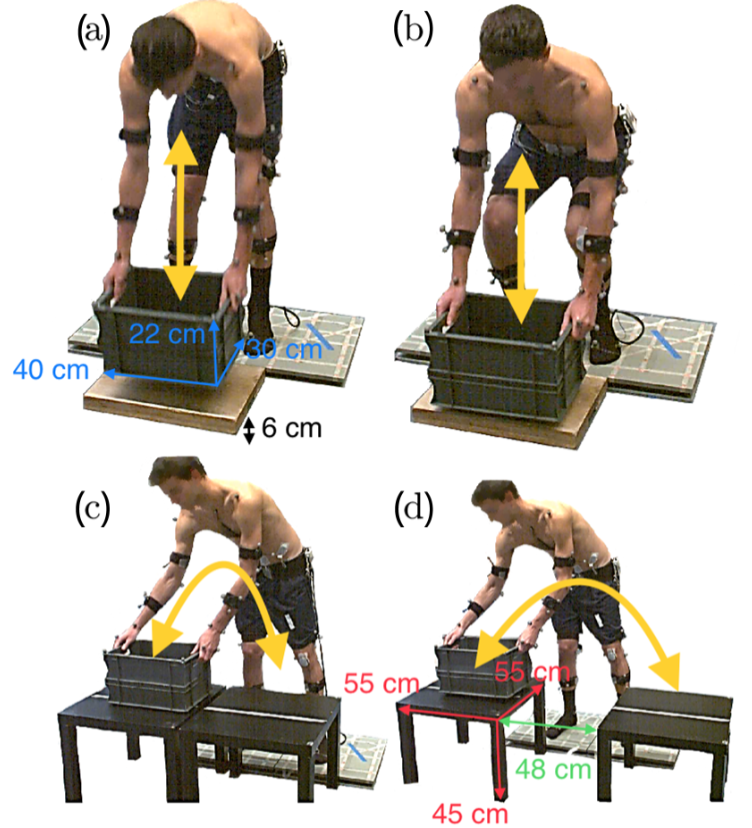
Muscle groups are controlled by a limited set of activation patterns or “synergies,” which allows the central nervous system to simplify coordination during complex movements. This principle was utilized in the EMS model to capture necessary data from fewer EMG sensors. To validate this approach, the researchers designed a study with twelve participants performing common lifting techniques, including squat, stoop, unilateral twist, and bilateral twist, under varying loads of 0 kg, 7.5 kg, and 15 kg. The analysis revealed that two muscle synergies were sufficient to account for 91% of the variance in muscle activation during these tasks.
Building on this synergy-based model, the researchers identified strategic EMG sensor placements for each participant to estimate the activity of four additional, unmeasured muscle groups. They then compared the estimated muscle activity with data from the complete EMG sensor array. The reduced two sensor setup demonstrated high correlation achieving median R² values between 0.70 and 0.86, and root mean squared errors (RMSE) of 0.02 to 0.04. This showed that synergy-based sensor reduction could retain muscle activity information while substantially lowering the required sensor count.
By reducing the number of sensors without compromising accuracy, this model enhances wearability, making biomechanical monitoring more accessible for workplace use. This innovation will be built on in the SWAG project, which focuses on fabric-based soft robotics, integrated sensing, and real-time motion assistance. SWAG aims to provide adaptive support for complex movements by integrating distributed control and AI, with one of the use cases being occupational assistance. This synergy-based model can directly benefit ergonomic assessments and interventions for workers prone to LBP. Additionally, the model’s application in exoskeleton or exosuit design, where sensor count and placement are crucial to usability, helps meet one of the goals of SWAG to overcome limitations in wearable devices by optimising sensor placement and ensuring accurate real-time support.
Read the publication here.