
Articles & Newsletters
-

BENDABL Represents SWAG at Future Ready 2026 in Brussels
On Thursday, 16 April 2026, BENDABL participated in Future Ready 2026 in Brussels as part of the SWAG project. The event brought together researchers, innovators, industry representatives and policymakers to exchange ideas on how AI, data…
-

SWAG and SoliDAIR : Robotics Beyond the Lab
SWAG and SoliDAIR : Robotics Beyond the Lab The most interesting robotics projects are often the ones focused not only on innovation itself, but on how technology can work in real conditions and respond to real…
-

Newsletter #4: Open Call for Demos & Posters, SWAG Research, Project News and More
Newsletter #4: Open Call for Demos & Posters, SWAG Research, Project News and More Our fourth project Newsletter is now out, featuring our latest research and news. You can read it here. Stay updated on our groundbreaking work…
-
Tailored to Move at ICRA 2026 extends deadlines for Posters and Demos
Tailored to Move at ICRA 2026 extends deadlines for Posters and Demos Tailored to Move: Wearable Robotics for Motion Assistance workshop has announced an extension of the deadlines for its Call for Posters and Demos. The…
-
Join Tailored to Move at ICRA 2026: Call for Posters and Demos now open
Join Tailored to Move at ICRA 2026: Call for Posters and Demos now open The SWAG project is pleased to announce the Call for Posters and Demos for the Tailored to Move: Wearable Robotics for Motion…
-

PALPABLE and SWAG spotlight the growing potential of soft robotics
PALPABLE and SWAG spotlight the growing potential of soft robotics Soft robotics continues to gain ground as a field with the power to transform how technology supports people in high-precision, high-impact environments. Two Horizon Europe projects…
-
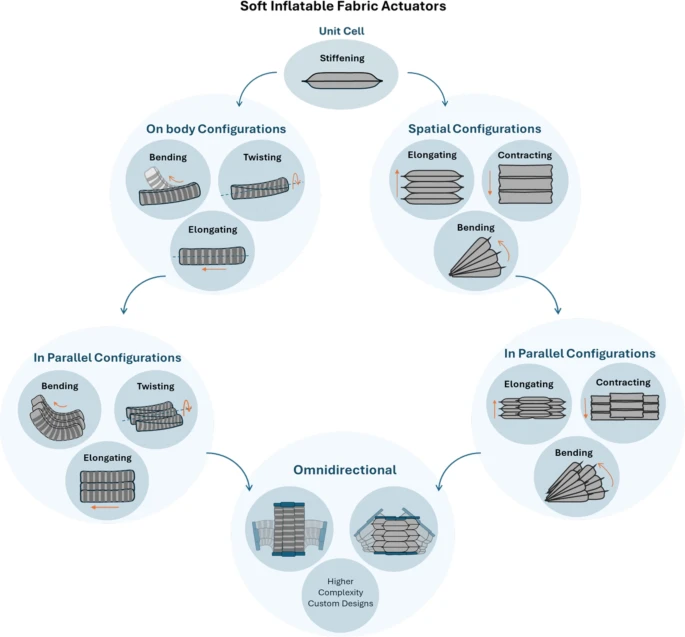
A Unified Framework for Soft Inflatable Fabric Actuators
A Unified Framework for Soft Inflatable Fabric Actuators A newly published study, “A Unified Framework for Soft Inflatable Fabric Actuators”, by Odysseas Simatos, Konstantina Tsintzira, Grigorios M. Chatziathanasiou and Panagiotis Polygerinos from SWAG partner Hellenic Mediterranean…
-

SWAG Plenary Meeting in Munich Highlighted Progress Towards Integrated Wearable Robotics
SWAG Plenary Meeting in Munich Highlighted Progress Towards Integrated Wearable Robotics SWAG partners met in Munich on 11–12 December 2025 for the project’s M26 Plenary Meeting, hosted by the Technical University of Munich at the Siemens…
-
SWAG and TUBERS underline the expanding reach of soft robotics
SWAG and TUBERS underline the expanding reach of soft robotics Soft robotics is increasingly proving that its potential goes far beyond a single field of application. Across Europe, new research is showing how soft, adaptive robotic…
See all News articles
Media
Events
-
SWAG presents Tailored to Move workshop at ICRA 2026
SWAG presents Tailored to Move workshop at ICRA 2026 The SWAG project is excited to present Tailored to Move: Wearable Robotics for Motion Assistance, a full-day workshop to be held on 5 June 2026 as part…
-

Join the SWAG Hands-on Workshop on CEINMS-RT
Join the SWAG Hands-on Workshop on CEINMS-RT On 29 October 2025, SWAG will host an online hands-on workshop dedicated to CEINMS-RT, an open-source platform for real-time neuro-mechanical model-based control of wearable robots. The workshop will focus…
-

SWAG at ADRF25: Human‑centred AI and wearable robotics for reducing manual labour strain
SWAG at ADRF25: Human‑centred AI and wearable robotics for reducing manual labour strain On 23 September 2025, SWAG joined the AI, Data and Robotics Forum 2025 (ADRF25) in Stavanger, Norway as part of a MANiBOT‑led workshop…
-

Highlights from the SWAG Workshop at RehabWeek
Highlights from the SWAG Workshop at RehabWeek The SWAG consortium was proud to contribute to RehabWeek 2025 in Chicago, USA, the premier gathering for rehabilitation technology professionals from around the world. Hosted from May 12–16, RehabWeek…
-

SWAG debuts at online showcase event
SWAG debuts at online showcase event On February 22nd SWAG had its public debut at an online event co-organised by Adra – AI-Data-Robotics-Association, AI-on-Demand Platform and the European Commission. The webinar showcased the future of innovation in AI, Data &…